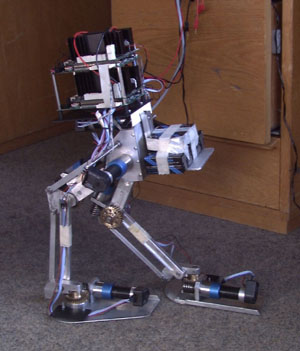
I developed this robot with my father, who made all mechanical pieces. I made a raw calculations of masses, power consumption, motor needs etc.
The main caracteristics of this robot are:
This robot made some steps in a configuration where the batteries are installed on the robot but not used (external power) and the robot is controlled by the software sysquake of calerga
Here are some drawings of the robot including list of pieces, type of motors etc. All in french...
Comments are welcome to me.